Services
Using a service
To use a service, you need to have a TestbedProxy instance that is connected to the testbed server. You can then access
the service as an attribute of the testbed proxy, using the service ID, as defined in the configuration file, as the attribute name.
For example, if you have a service with the service ID science_camera, you can access it through its proxy as follows:
from catkit2 import TestbedProxy
testbed = TestbedProxy('127.0.0.1', 1234)
science_camera = testbed.science_camera
where the port number is replaced by the correct value of your testbed server. Alternatively, you can use the get_service() method of the testbed proxy:
science_camera = testbed.get_service('science_camera')
The service proxy will automatically start the service as soon as you try to access one of its attributes (property, command or datastream) if it is not already running, and will raise an exception if the service has crashed or is in failsafe mode. You can then use the service proxy to call methods, or access properties and datastreams of the service as usual.
Service configuration
Each service to be used with a testbed needs its own entry in the configuration file services.yml. The config entry
of each service contains two blocks:
The general setup block
The service-specific parameter block
The service-specific parameter block contains any parameters specific to the service in question.
The general setup block contains four standardized entries, although not all of them are mandatory:
service_type
simulated_service_type
interface
requires_safety
An example for such a general setup block, in this case for a camera, is given here:
science_camera:
service_type: zwo_camera
simulated_service_type: camera_sim
interface: camera
requires_safety: false
... # -> specific parameter block
The “name” of a service, in the above example science_camera, is called the service_id and needs to be unique
across all services. You can however have several services use the same service_type. For example, you can have three camera serviced with
service_ids cam1, cam2 and cam3 all using service_type: zwo_camera, but you cannot duplicate service IDs.
You can find example service configurations for each service type in the documentation of the built-in services.
Note
The config keys service_type and requires_safety are mandatory, the others are not. You need at least the service_type when running on hardware, which will be interpreted as the simulated service type when running in simulated mode if the latter hasn’t been set explicitly. The interface (service proxy) is optional.
The key requires_safety is a simple boolean that defines whether safety is checked while the service is running, and
whether changes in the safety reports will influence the running service.
The key simulated_service_type designates which service is used when running the testbed in simulated mode.
Simulated services are also “just” services, implemented in the same way. The crucial difference is that they do not
talk to hardware and instead talk to the testbed simulator service stored in the object self.testbed.simulator.
The simulator holds an instance of the optical model, saved in self.model.
The key interface specifies which service proxy is used for a service. This key is optional. If not set, a default service proxy class will be used.
Launching and debugging a service
Services can be started both by the Testbed upon requests from a TestbedProxy, or manually from the command line. The
latter might be advantageous when debugging a service since not all the output of a service is logged. Services implemented in Python can be
started manually from the command line using :
python service_type.py --id <service_id> --port <service_port> --testbed_port <testbed_port>
for the science camera this would look like:
python zwo_camera.py --id science_camera --port 1235 --testbed_port 1234
Note that the service port here is arbitrary (more discussion later).
C++ services can also be started manually from the command line using:
service_type.exe --id <service_id> --port <service_port> --tesbed_port <testbed_port>
where <service_id> and <testbed_port> are replaced by their correct values, <service_port> is arbitrary. Services will
register themselves with the testbed. After registration, you can use them from any TestbedProxy as usual. Note that
even in this case, the service_id needs to be an entry in the services.yml configuration file. Otherwise, the
testbed does not have a configuration to provide to the service. Services running in the terminal can be interrupted
using Ctrl+C, or by stopping them using a separate TestbedProxy or ServiceProxy.
Service state
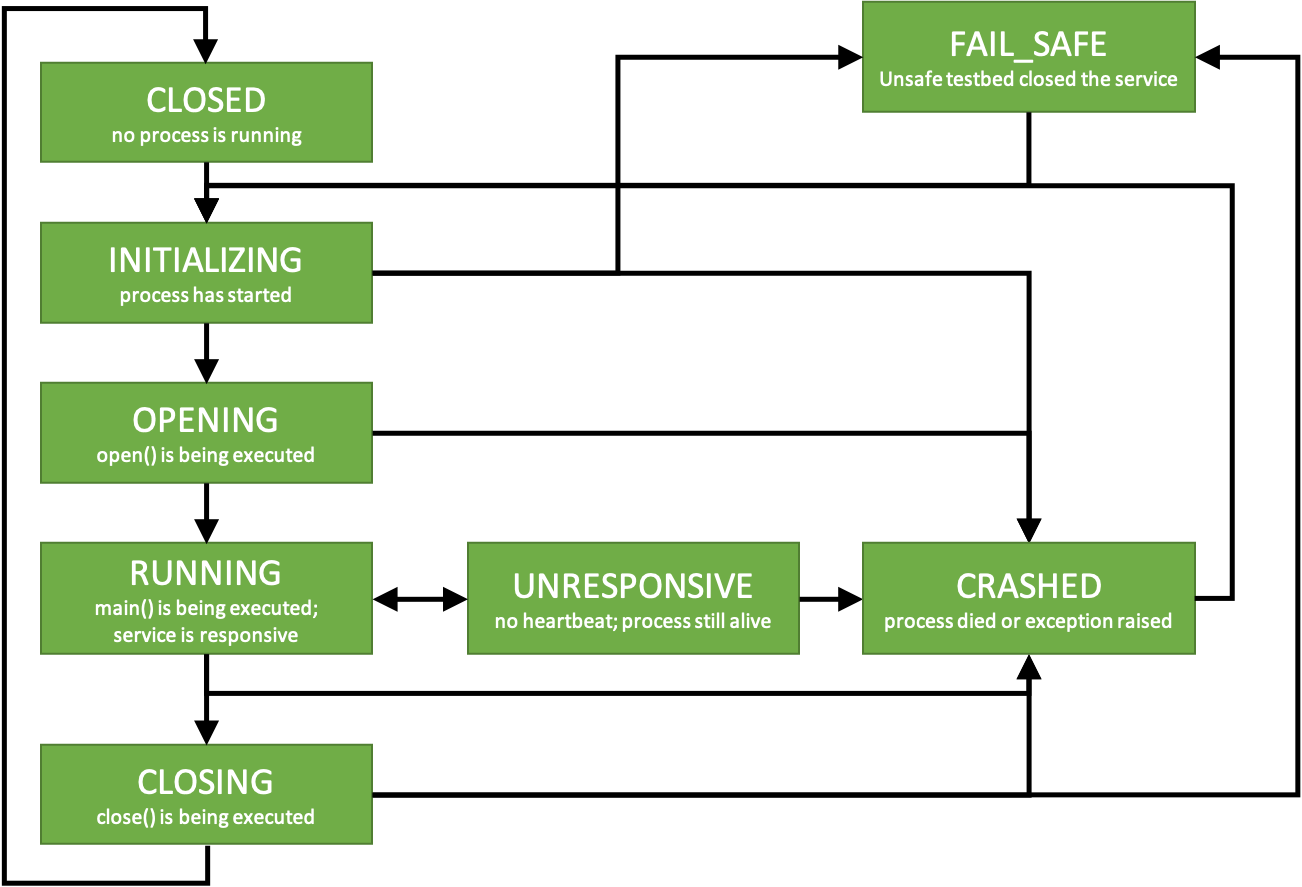
The state of the service is managed by the testbed and the service. It keeps track of what the service is currently doing. The service states are:
Closed. No process for this service is running.
Initializing. A process has been started, but it’s still initializing and has not started opening the service yet.
Opening. The
open()method is being called and the connections with hardware or other services are being established.Running. The service is operational, the
main()function is being called and the service is responding to requests on its server.Closing. The
close()method is being called and the service is being shut down safely.Unresponsive. The service process has stopped sending heartbeats, but is still running.
Crashed. The service has crashed. The service may have raised an exception during its operation or may have crashed outright without shutting down safely.
Fail_safe. The service was safely closed because of safety violations.
The allowed transitions for a service state are displayed in the below diagram.
Handling a service
You can check the state of a service in the following way:
print(testbed.science_camera.state)
print(testbed.science_camera.is_running) # whether the service state is RUNNING
print(testbed.science_camera.is_alive) # whether the service state is any of the alive states (ie. not CRASHED, FAIL_SAFE or CLOSED)
For stopping and starting a service:
testbed.science_camera.stop()
testbed.science_camera.start()
A service is also started automatically if you try to access an attribute (property or command or datastream) on a service. If the service has crashed, or is in failsafe mode, then the service will refuse to start by itself or via the service proxy alone. This is to avoid an infinite loop of the service crashing and restarting, which is undesired. Instead, you can ask the testbed server to start a CRASHED/FAIL_SAFE/CLOSED service:
testbed.start_service('science_camera')
Creating your own service
File structure and file naming for services
Create a folder under services/ named for your service. Add a Python module with the same name. The service class
inside the module should use the same name but in CamelCase, see also next section.
Also create a simulated-service folder using the same base name with the suffix _sim.
Add a proxy module for the service in testbed/proxies/ (named after the service), and create a documentation page under docs/ for the service; include that page in index.rst.
- ::
Example:
- services/
├── my_service/ │ ├── my_service.py # service implementation ├── my_service_sim/ │ ├── my_service_sim.py # simulated service implementation
- testbed/
├── proxies/ │ ├── my_service.py # service proxy implementation
Services and service proxies can also be defined outside of catkit2 if there is a more specific or new need.
Note
No matter where a service and/or proxy is defined, they need to be added to the entry points in the pyproject.toml file of
catkit2, so that they can be found by the testbed server and testbed proxy.
Service implementation
Each service is contained in its own module, and is implemented as a class. The name of the class can be arbitrary, but
it is recommended to use the same name as the service type in CamelCase. For example, if your service type is my_service,
then the service class should be named MyService. The same applies to the simulated service, which should be named MyServiceSim in this case.
Note
Services inherit from
ServiceSimulated services inherit from
ServiceService proxies inherit from
ServiceProxy
When implementing a service, you need to implement at least the following methods:
- init(): Called when the service process is started. Contains all the code that is needed to initialize the service. For example, this includes reading any variables from the service configuration that are needed for the service to run.
- open(): Called when the service is started. Contains all the code that is needed to start the service and make it operational. For example, this includes establishing connections with hardware or other services, and starting any threads that are needed for the service to run.
- main(): Called when the service is running. Contains all the code that is needed to keep the service running.
- close(): Called when the service is stopped. Contains all the code that is needed to safely shut down the service. For example, this includes closing connections with hardware or other services, and stopping any threads that were started in the open() method.
At the end of a service file, you need to add the following code to allow the service to be started:
if __name__ == "__main__":
service = MyService() # replace with the name of your service class
service.run()
Example implementation
A good examples of a previously implemented service: Physik Stage Controller